



About Project
Quadcopter
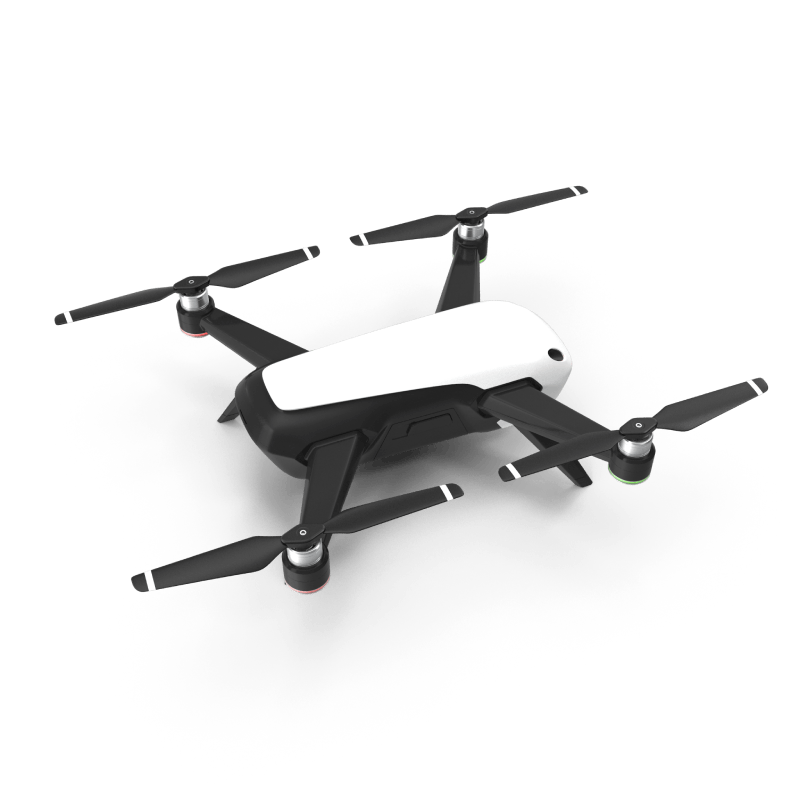
Quadcopter is an UAV(unmanned aerial vehicle) with four rotors, each with a motor and propeller. It is a semi autonomous.
The quadcopter covers the below four movements:
- Vertical
- Rotational
- Front to Back
- Left to Right
Spesifications
-
Dimension 500mm Diagonal Size
-
Weight 800 Gram
-
Power Consumption 12V
-
Materials ABS Plastic
-
Sensor Accelerometer, Gyro, Compass, GPS, Barometer, Camera
-
Battery Duration 30 min to 1 H
Performance
Material
Consumtion
Integrations
Sensor
Battery
Feature
Awesome Feature
We are intelligence in action.
Self/Auto-level mode
when you let go off the control stick, the drone would return to its levelled position.
Waypoint GPS Navigation
Allows the quadcopter to fly on its own with it's flying destination or points preplanned and configured into the drone remote control navigational software.
Altitude Hold feature
Allows the quadcopter to fly on its own with it's flying destination or points preplanned and configured into the drone remote control navigational software.
Return to Home feature
A failsafe mechanism that allows the quadcopter to safely go back to a preset home point when it loses connection to the remote controller, the battery is getting too low, or the user chooses to do so
