For Aerial, Logistics & Surveillance
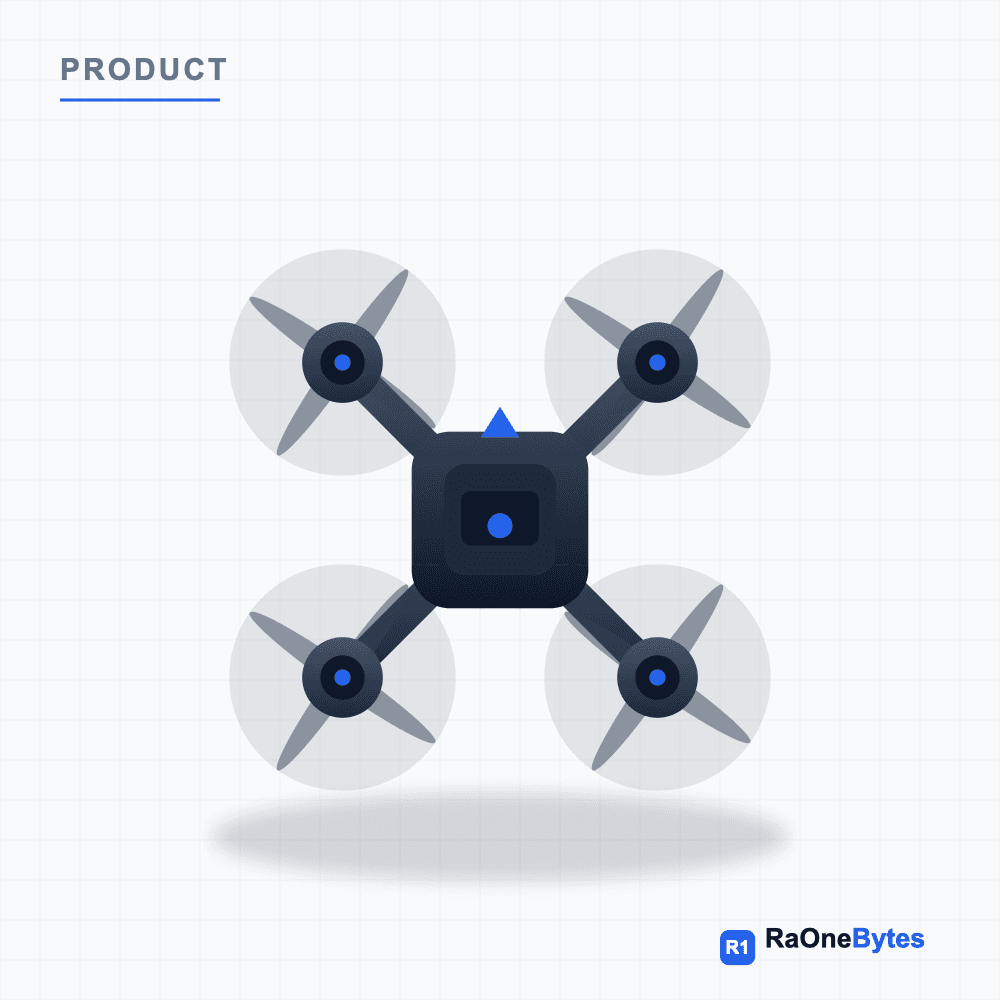
Quadcopter (UAV)
A semi-autonomous four-rotor UAV that flies waypoints, holds altitude, and returns home on its own.
Capability: Drone & UAV Development
The Challenge
Aerial missions demand a drone that can fly a planned route reliably and recover itself safely if the link drops or the battery runs low, without a pilot manually holding it steady the entire flight.
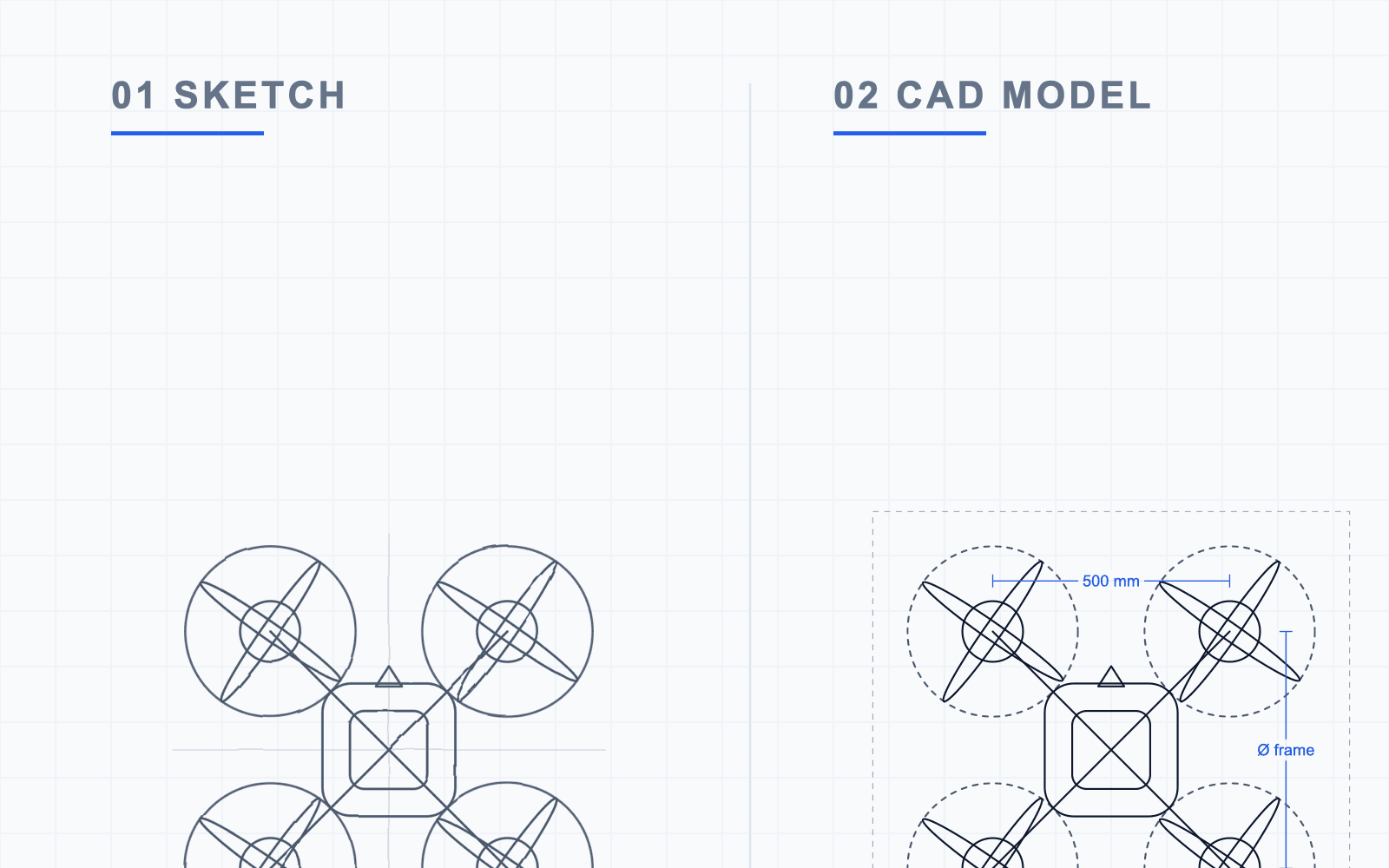
From sketch to product
How we took Quadcopter (UAV) from concept to a working build.
Define the mission
We scope payload, range, and flight time for the task (surveillance, mapping, or delivery) to set the airframe and power budget.
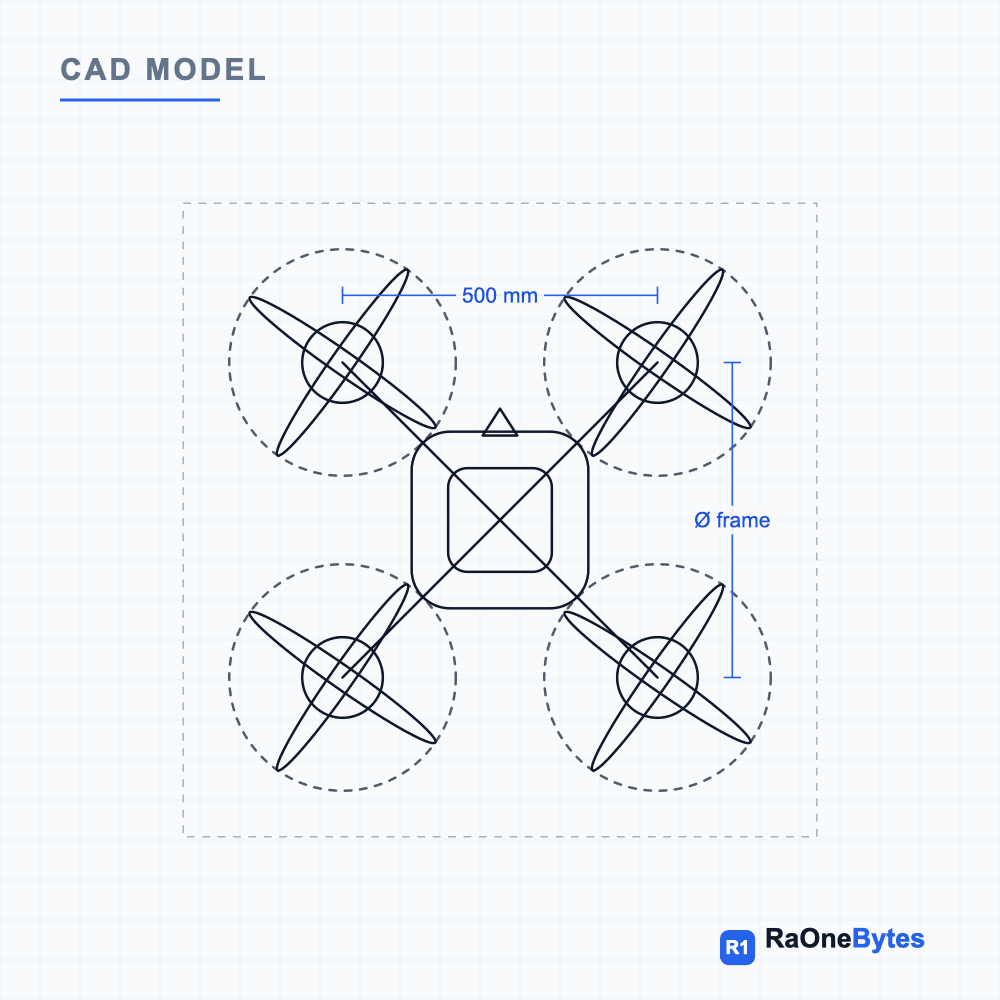
Design the airframe
A 500 mm-class four-rotor airframe is designed around the flight controller, GPS, and sensor suite for stable, controllable flight.
Tune the autopilot
Accelerometer, gyro, compass, GPS, and barometer feed an autopilot tuned for auto-level, altitude hold, and precise waypoint tracking.
Validate flight modes
Auto take-off and landing, GPS waypoint missions, and return-to-home failsafe are validated so the aircraft flies and recovers itself reliably.
Key features
Auto-level
Release the stick and the drone returns to a stable, level hover on its own.
Altitude hold
The quadcopter automatically maintains a set altitude for steady flight.
GPS waypoint navigation
Fly preplanned routes autonomously with destinations configured into the ground control software.
Return to home
A failsafe returns the aircraft to a preset home point on lost link, low battery, or command.
Auto take-off & landing
Automated take-off and landing for repeatable, hands-off launch and recovery.
Full IMU & GPS suite
Accelerometer, gyro, compass, GPS, and barometer for accurate attitude and position.
Specifications
- Dimensions
- 500 mm diagonal
- Weight
- 800 g
- Power
- 12 V
- Material
- ABS Plastic
- Sensors
- Accelerometer, Gyro, Compass, GPS, Barometer, Camera
- Battery
- 30 min – 1 hour
Gallery
Applications
- Surveillance & monitoring
- Aerial inspection & mapping
- Shipping & delivery
- Search support
The Outcome
A semi-autonomous UAV that flies a mission and brings itself home, a reliable aerial platform for surveillance, inspection, and shipping or delivery payloads.
More case studies


Start your build with Raonebytes
Tell us what you're building and we'll scope it with a fixed quote, usually within 24 hours. Every project under NDA.